Grading Machine Innovation Challange
Grading size and Quality of Local Tomatos cultivated in Eastern Hills of Nepal

Project Information
- Keywords: Tomato grading, Machine Vision, Machine Learning, Slope & Divergence
- Team:
- Ranish Devkota, Gokarna Baskota, Sadanand Paneru, Shuruchi Yadav
Facility used: Robotics club
Project Overview
This project was developed in collaboration with the support of swisscontact(Sahaj) Project and DELTA 3.0 at the Institute of Engineering, Purwanchal Campus. The Project aims to grade the spherical vegetables(Tomatoes). Grading is multistepped process where Size, and Quality are to be graded.The system combines computer vision and mechanical systems to automate the categorization of vegetables based on their size and ripeness.
Methodology
The Grading machine is roughly divided in 2 modules or category
These size grading proved effective means to segrgrate the farmers collection in the collection centre of these region in Eastern Hills, However The grading often have to come with the quality. for quality , the ripeness is to be determined and for this purpose Computer Vision had been used as premodel of Cyber-physical System in Agriculture production



The images then used to train a network that leverages the Transfer Learning from MobileNet V2 which shall help train the network on the foundations of images followed by average pooling. The base model thus prepared is coupled with dense layers of neural neteorks of 512, 1024, 512 neurons consecutively of each having activation function as ReLU and optimizer being Adam. The network was trained for 10 epoch obtaining accuracy of 0.975 (Normalized to 1) and thus obtained model had been saved for deployment.
.png)
Results

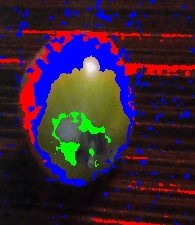
The model was then used along with implementing RGB Masks highlighting areas after as well as categorizing the tomato quality. The model was deployed in cloud whereas real time picture is captured by the camera and fed to network leveraging the computational offloading and provide results.
Conclusion
This Grading machine was first prototype that requires lots of iteration. key takeouts are quality and Size Grading coupled with Machine Vision & Edge computing. However improvements can be made in all the sectors as