Projects
Most of my projects are Robot & Robotic systems as well as their implementation. I usually seek to implement most of the aspect of learning such as Computer vision, ROS , Control & embedded systems in single project traversing to depth rather doing multiple project. During my university days , I was more keen to study and implement the system to the Agriculture with amalgamation of learning from Computer Engineering , Electrical & Mechanical engineering as well as Agricuture engineering.
Currently at Orion Space I am more exposed with the aspects of Communication engineering, Satellite technology , Embedded & Instrumentation systems as well as Satellite Control systems (ADCS)
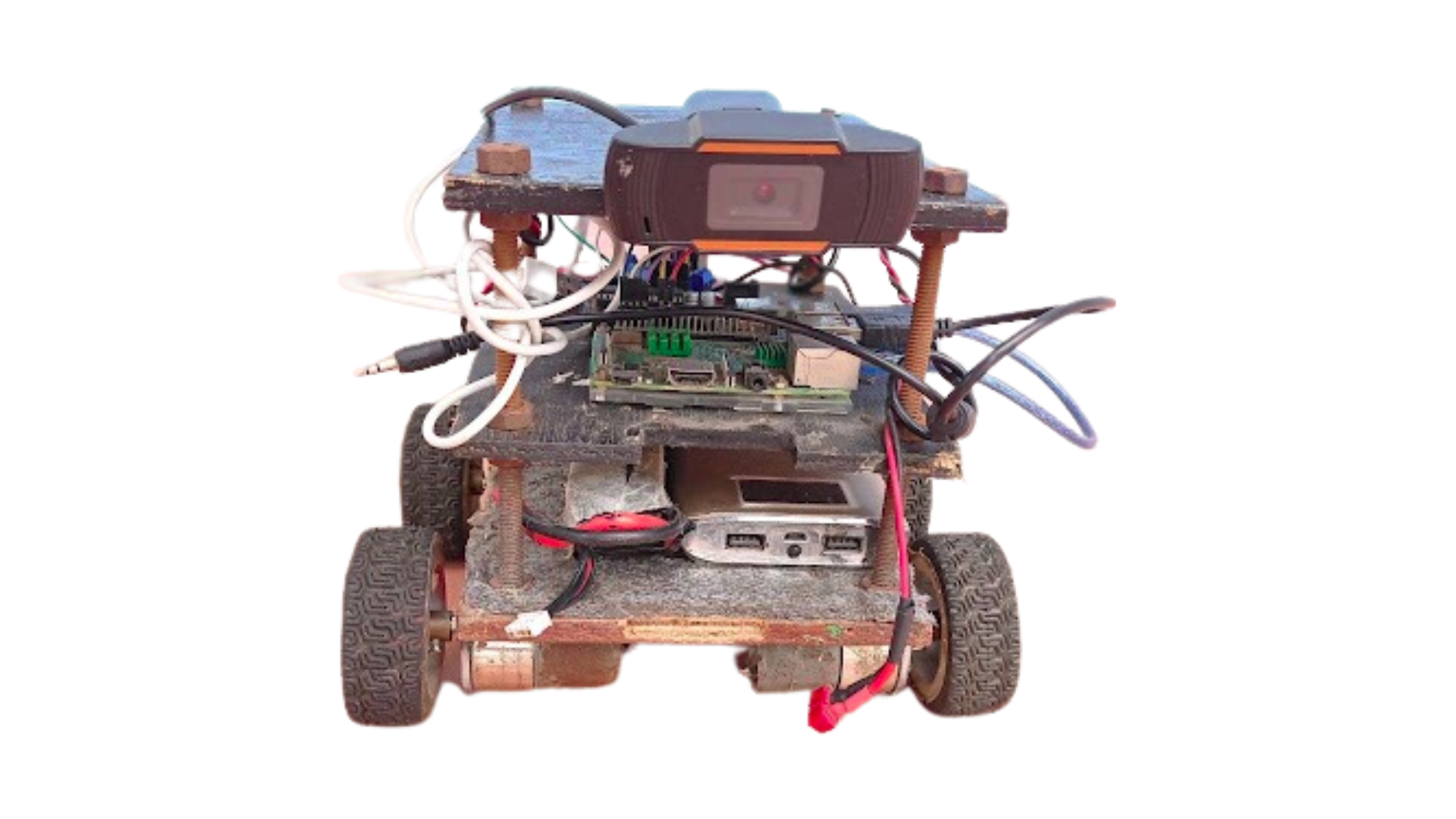
Slam with Mobile robot via Mono-cam
The self fabricated Mobile-Robot performing Mapping, Localization & SLAM implementation with cheap monocular USB Camera.
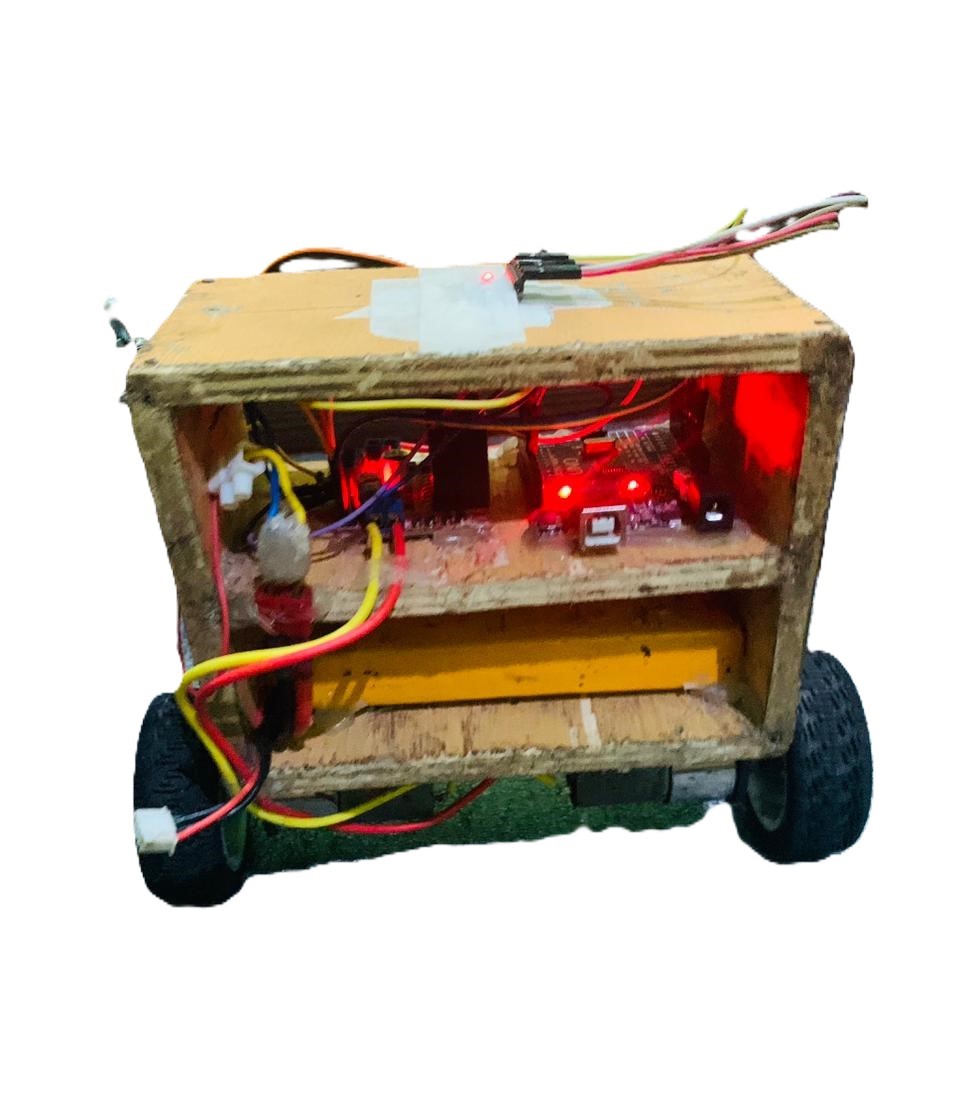
Two wheeled Self Balancing Robot
The Self fabricated two wheeled robot which is mathematically modelled to make it stable with design of closed-loop controller.
Controllers and comparision for TWSBR
A Simulated robot's Controller design focuses on control-comparision for various impulsive and amplitude distrubances simulated as force done in MATLAB/SIMULINK in simscape multibody library.


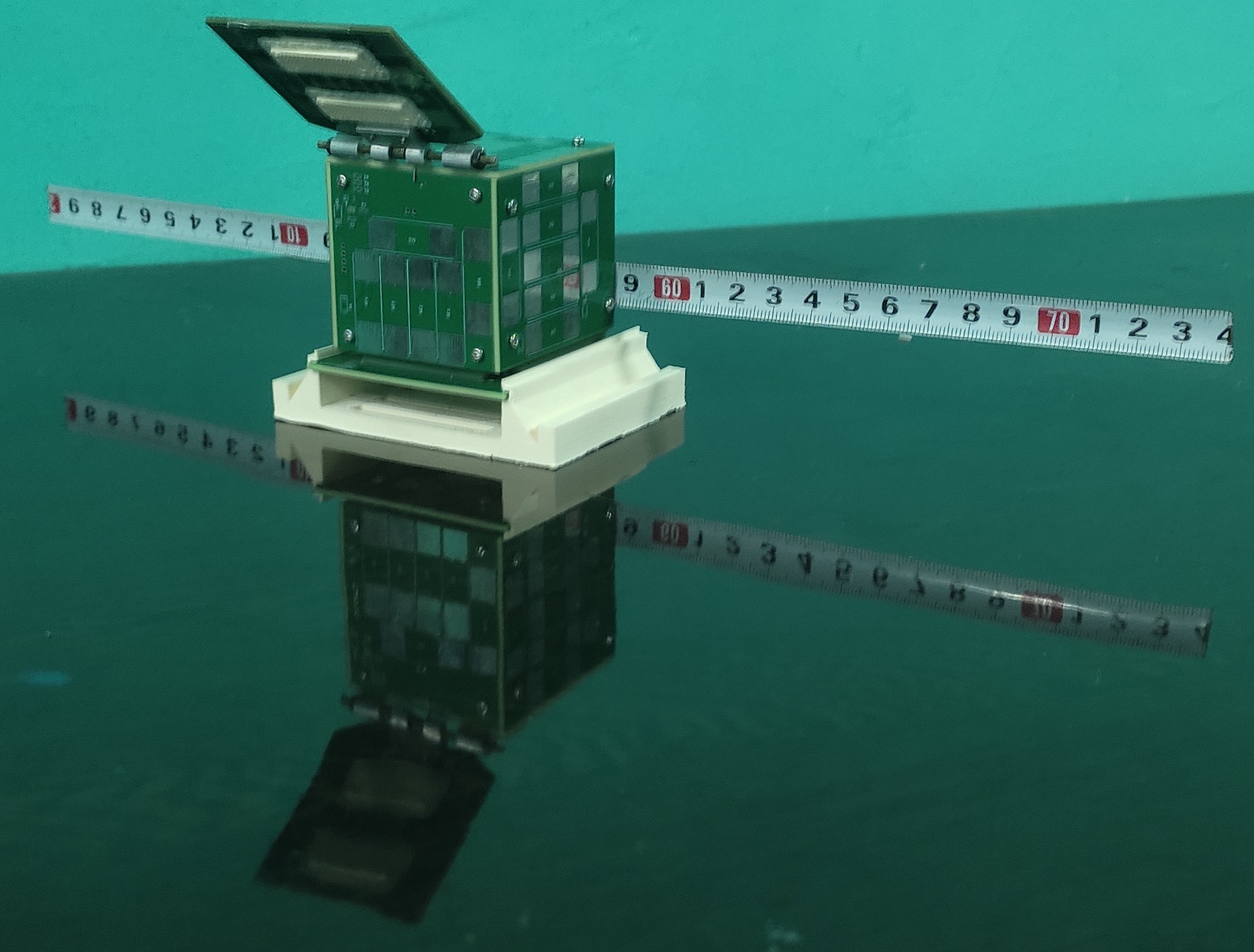
Design & Development of Pocketcube
The Pocketcubes are nanosatellites. This is the Sanosat-2 a Pocketcube of Nepal with Camera as major payload along with sunsensors & IMUs that us being developed at Orion Space..